路径与点列表
路径与点列表
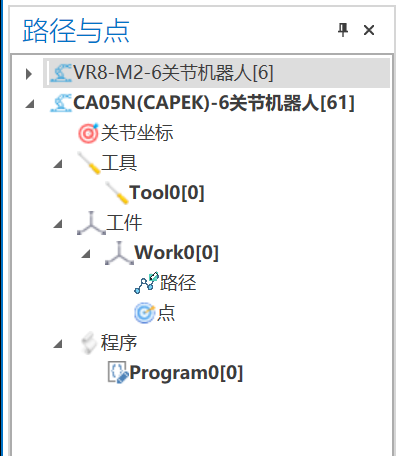
机器人离线编程通过【路径与点】管理,它记录了机器人场景中的每个机器人相关资源,这些资源无需要系统集成就能运行,实现快速机器人工艺验证。 通过【机器人】-【路径与点】进入,显示如下菜单,仅有一个机器人时的相关资源如下:
注意:右键菜单的功能选项前的英文大写字母为当前功能的执行快捷键。
每组机器人资源包括:机器人及工具、关节坐标、工具坐标、工件从标、程序。其中工件从标下面包括路径与点。
机器人
场景中的每个机器人都会生成一个根节点,然后以机器人的名称命名,与此机器人相关的数据全部在其子节点下。其右键功能如下:

- 重命名: 修改机器人的名称;
- 激活: 设置当前机器人为活动机器人,所有的操作都针对此机器人,激活后机器人的名称将以粗体显示,以做标识;
- 子节点:关节坐标
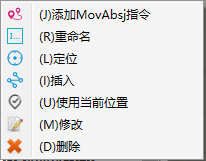
机器人的关节坐标点将罗列在此节点下,即以机器人每个关节的角度值组合后来定位一个点,所以又称为关节绝对坐标,这些目标点用于添加MOVABSJ指令时使用。其右键功能如下:
![]()
- 添加关节坐标点 ,用于在列表里添加一个关节坐标点;
此级节点为具体的关节坐标点,双击节点可以打开此点的编辑窗口,如下图:

其中点的名称和各个关节的值都可以修改。针对关节坐标点的右键功能如下:
-
添加MovAbsj指令,使用当前点生成MovAbsj指令;
-
重命名,修改点的名称;
-
定位,在3D视图里定位当前点;
-
插入,添加一个新点;
-
使用当前位置,将在3D视图里调整后的机器人的关节值作为当 前关节坐标点的值;
-
修改 ,打开当前关节坐标点的编辑窗口,如上图;
-
删除 ,从列表里删除当前点,以及引用此点的指令;
工具
此节点下罗列当前机器人的工具坐标,可以有多个工具坐标。其右键功能如下:
- 添加 ,添加新的工具坐标;
此级节点为具体的工具坐标,双击可以打开当前工具坐标的编辑窗口,如下图:

在此窗口里可以修改名称和工具坐标的值。其右键功能如下:

-
添加TOOL指令 ,基于当前工具坐标生成TOOL指令;
-
重命名,修改当前工具坐标的名称;
-
激活,以当前工具坐标作为活动的工具坐标,激活后,当前工具坐标会以粗体显示;
-
修改,打开当前工具坐标的编辑窗口,如上图;
-
删除 ,删除当前工具坐标;
注意: Tool0是不能修改的,其为其它工具坐标的基点。
工件
此节点下罗列当前机器人的工件坐标,其右键功能如下:
![]()
- 添加 ,添加新的工件坐标;
此级节点为具体的工件坐标,工件坐标下可以有两类数据:路径轨迹点和离散的空间点,其分别以列表形式体现。此级节点的右键功能如下:
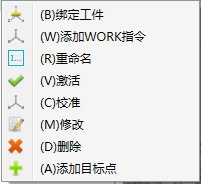
- 绑定工件, 为当前工件坐标绑定工件或者解绑定工件,绑定工件后工件坐标移动工件会跟着移动,始终保持相对位置不变;
- 添加WORK指令, 以当前工件坐标生成WORK指令;
- 重命名, 修改当前工件坐标的名称
- 激活, 以当前工件坐标作为活动工件坐标,激活后,当前工件坐标会以粗体显示;
- 校准, 只有与工件绑定的工件坐标才能使用此功能,对工件坐标进行校准,即确定工件坐标与工件的相对位姿关系,在编辑窗口里输入新的工件坐标的位置,如下图;

- 修改 ,打开编辑窗口,修改当前工件坐标的名称和位姿值,如下图:

- 删除, 删除当前工件坐标;
- 添加目标点, 在此工件坐标下添加点,默认的位置为当前机器人的活动的工具坐标所在的空间点的位姿;
> 注意:Work0是不能修改的,其为其它工件坐标的基点。