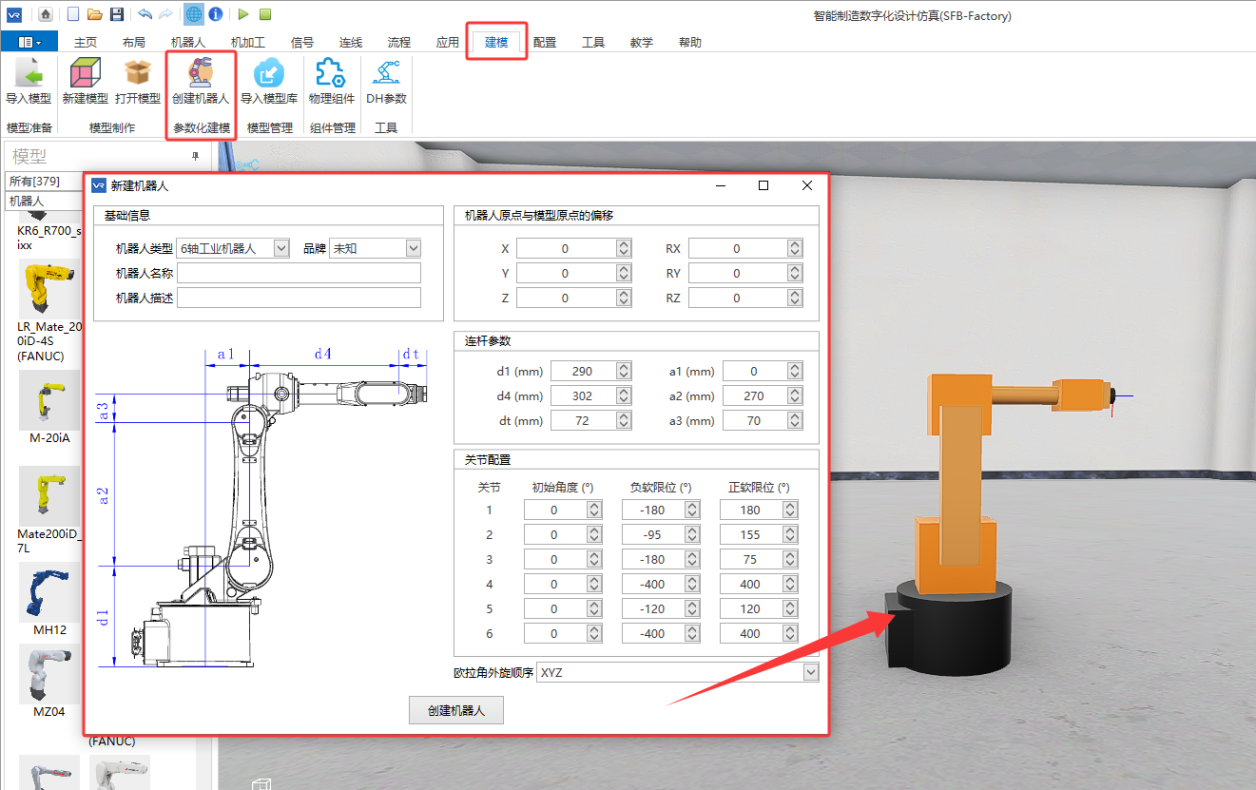
机器人仿真控制机器人常用功能参数化机器人生成本页总览参数化机器人生成 参数化机器人生成 软件可以根据机器人的DH参数(DH参数是一种用于描述机器人连杆间关系的标准方法)自动生成一个机器人模型,这个模型可以用于后续的运动学、动力学仿真以及路径规划等。 菜单栏【建模】-【创建机器人】填写机器人的基础信息与参数,点击“创建机器人”即可根据当前填写的参数简易生成一个机器人模型,如下图