轨迹显示
未端轨迹显示
这个功能用于显示和记录机器人末端执行器在执行任务过程中的运动轨迹。通过这个功能,用户可以直观地看到机器人在三维空间中的运动路径,从而分析机器人的运动是否合理、是否存在冗余动作等。
末端轨迹是用于直观显示一个物体的移动轨迹,特别是机器人的法兰的运动评估。末端轨迹通过模型球实现,有一个“轨迹球”模型,可从模型库搜索出来并拖到场景中,当作一个“工具”,安装到需要安装的位置。
选中轨迹球模型,可设置其属性、端口。轨迹球本质是由很多个小点组成,属性可设置颜色、粗细、段长度(每个点之间的长度,单位mm),轨迹显示段数,可设置最大长度9999,如果段长度=1,则最大长度可显示9.9米,超过此长度的轨迹会消藏。并可通过端口显示或关闭轨迹是否工作。
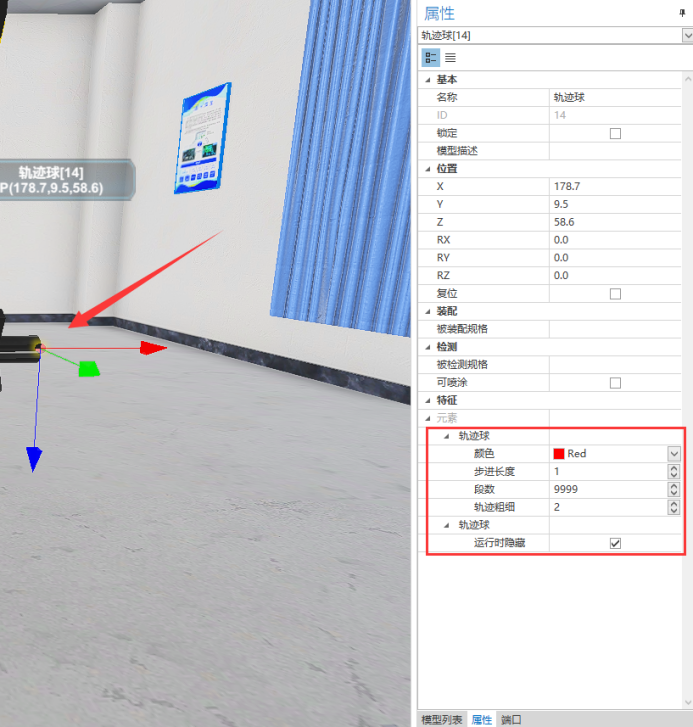

(轨迹属性设置) (轨迹端口控制)
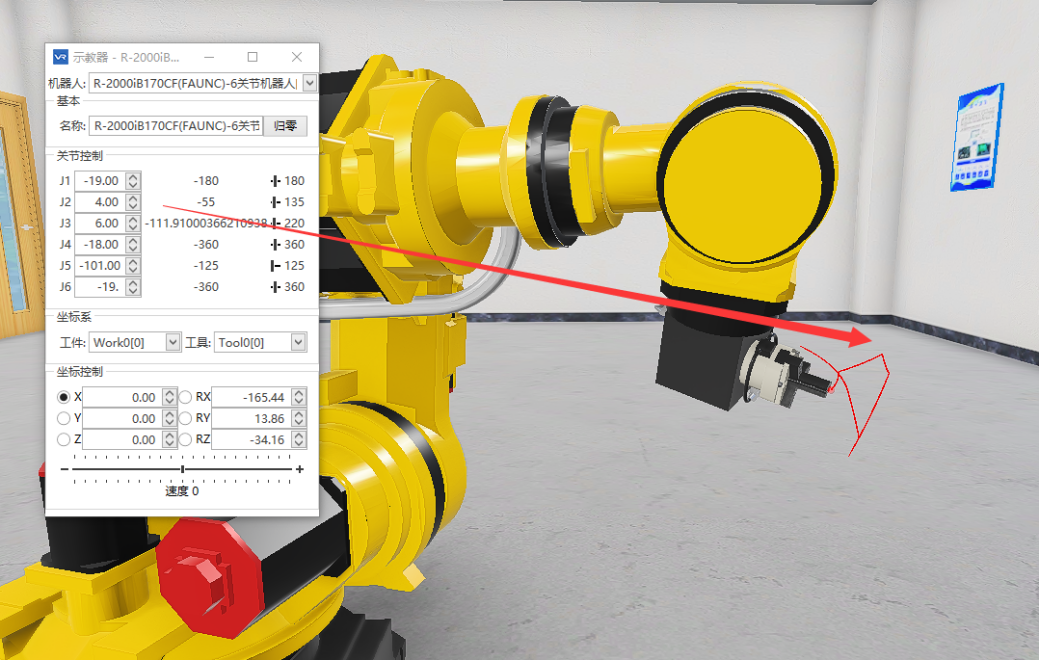
(轨迹显示)
备注:轨迹功能,非机器人也可以用