机器人基础控制
机器人控制
SFB仿真软件提供了机器人控制功能,用户可以通过鼠标拖拽的方式手动拖动机器人动作,控制机器人回零、关节、平移、旋转动作,配合示教器还可以精准的控制动作幅度。这个功能对于初步测试机器人模型、离线编程有很大的作用,可以快速的示教机器人点位形成路径。
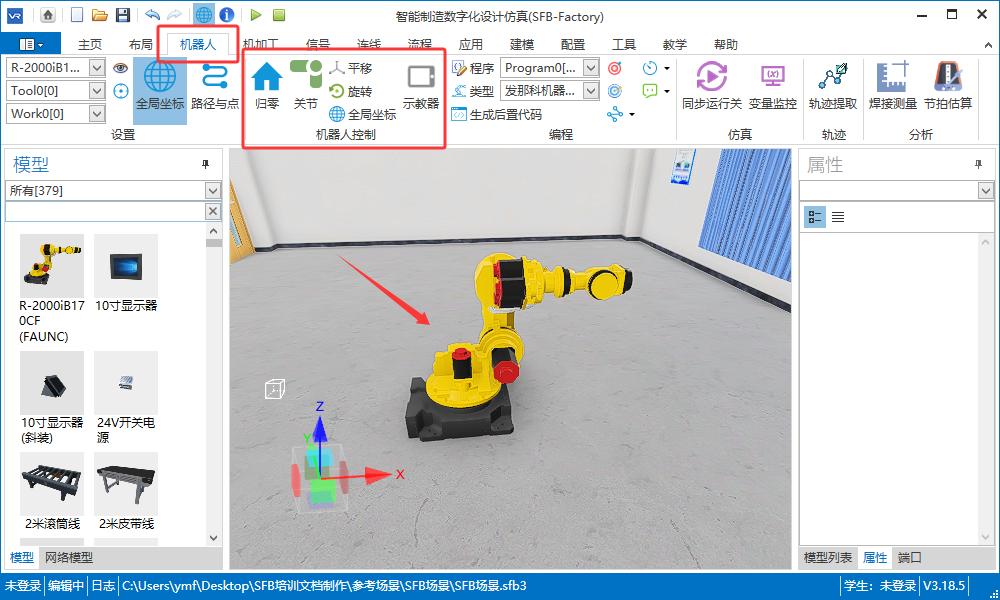
SFB的【机器人】中的【机器人控制】功能,如下图:

- 归零 :当前活动的机器人回零位;
- 关节 :机器人关节控制开关,打开此开关可以直接拖动机器人的关节来定位,生成目标点;
- 平移: 机器人工具末端平移控制开关,打开此开关则可以在机器人的工作范围内直接拖动机器人的工具末端来定位点;
- 旋转: 机器人工具末端旋转控制开关,打开此开关则可以直接旋转机器人的工具末端来调整点的姿态;
- 全局坐标: 切换工件末端坐标显示的模式,默认为关闭,即显示自身坐标,打开后为全局坐标;
- 示教器: SFB自动带一个通用的简易机器人示教器,可对各种机器人本体实现手动关节控制,手动直线控制。可以显示/调整关节值,当前工具末端的位姿,当前活动的机器人/工具坐标/工件坐标等,如下图;
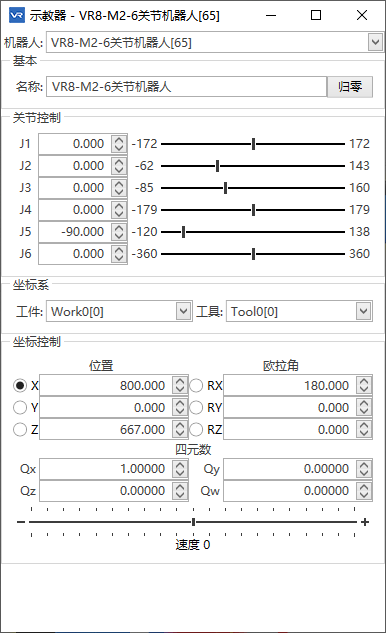
- 机器人名称:系统只显示一个示教器,通过选中机器人模型切换,在示教器的名称框内显示对应的机器人名称。
- 关节控制区:可直接输入值,或上下增加,或点击关节控制(以J1为例)的数据框,滑动鼠标滚轮,可以控制关节运动。
- 坐标控制区:拖动下方速度条或是点击数值框的上下箭头都可以进行操作,坐标与关节是相互关联,一个区修改,另外一个区也动。
- 四象数区:机器人四象数是指机器人在运动过程中,根据其在空间中的位置和方向,可以分为四个象限。这些值与坐标的值相互关联。