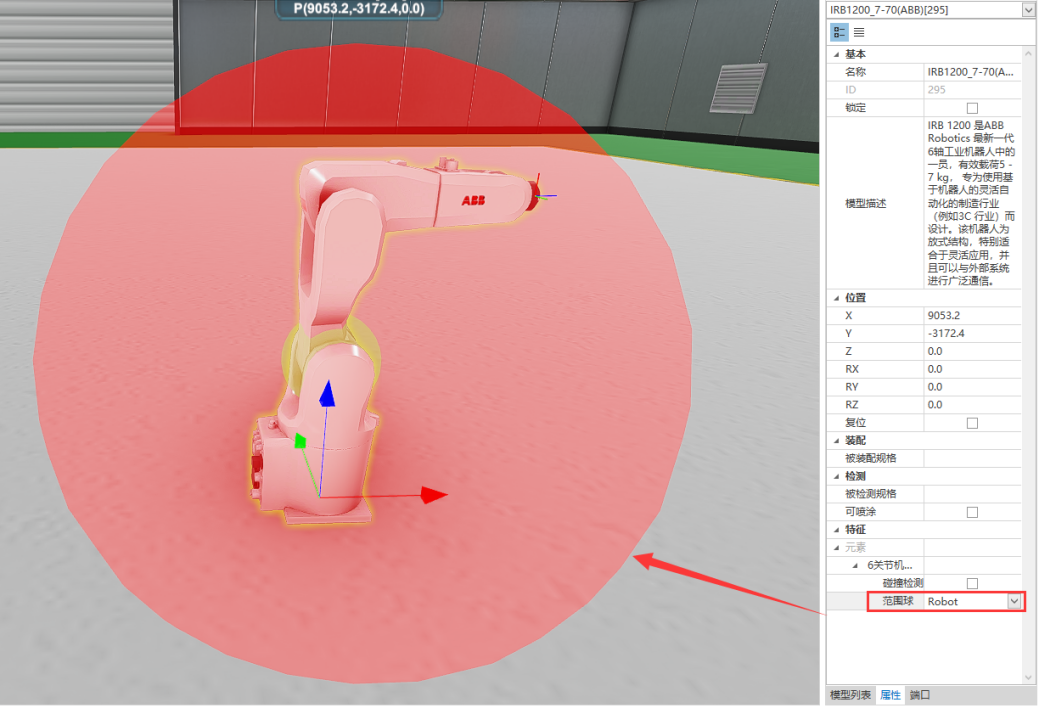
机器人仿真控制机器人常用功能机器人工作范围本页总览机器人工作范围 机器人范围球 机器人碰撞检测是运行时检测,而范围是静态显示,在布局就能显示是否有布局干涉。选中“机器人”模型打开属性栏,范围球选择“Robot”,红色区域为机器人运行范围