程序管理
程序管理
此节点下罗列当前机器人添加的程序,可以有多个程序。
机器人编程是SFB自带的一套标准编程语言,支持各种机器人的基础功能编程。编程验证后的程序也可后置成指定机器人的代码。
编程指令介绍
可以点击下拉小箭头查看支持的指令:


- 运动指令
用于编写机器人路径运动程序。MOVL/MOVJ/MOVABSJ/MOVC ,基于当前机器人的工具末端的坐标点,先添加相应的点,再添加点对应的机器人运动控制指令;
(1). MOVL: 直线运动指令 (2). MOVJ: 关节运动指令 (3). MOVABSJ: 绝对关节运动指令 (4). MOVC: 圆弧运动指令
- 功能指令
用于编写机器人控制程序。DELAY/WAIT/CALL/AOUT/DOUT/ SPEED/WORK/TOOL ,使用默认值添加机器人的辅助控制指令,添加后可以修改新添加的指令的值;
(1). DELAY: 延时指令 (2). WAIT: 条件等待 (3). CALL: 子程序调用 (4). RETURN :返回函数指令 (5). AIN: 模拟量输入 (6). AOUT: 模拟量输出 (7). DIN: 数字量输入 (8). DOUT: 数字量输出 (9). SPEED: 机器人运动速度指令 (10). WORK: 设置工件坐标指令 (11). TOOL: 设置工具坐标指令 (12). FOR: FOR条件循环指令 (13). WHILE: WHILE循环指令 (14). BREAK: 停止循环指令 (15). CONTINUE: 继续运行指令 (16). IF: 若...则...,条件指令 (17). ELSEIF: 否则,一般配合IF条件使用 (18). ELSE: 不然则,一般配合IF条件使用 (19). LABLE: 标签指令 (20). GOTO: 跳转指令,跳转到LABLE标签指令位置 (21). DEFINE: 声明变量指令 (22). EXPRESSION: 表达式指令
- 调试指令
Message,消息输出指令,这是一个调试的指令,不会在后置代码中生成;
程序编辑
- 新建程序
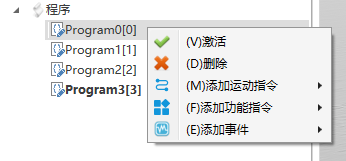
在路径与点窗口的“程序”节点下“可以查看所有的程序列表,选中“程序”节点鼠标右键可以新建新的程序:

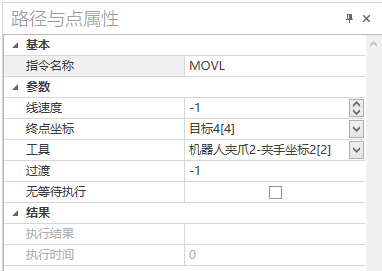
程序名称可以在界面右侧路径与点属性窗口,进行修改:

- 编辑程序
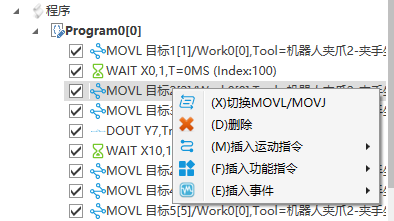
在路径与点窗口的“程序”节点下选中要编辑的程序名称,鼠标右键添加程序指令。
添加运动指令后,选中添加的指令,鼠标右键可以切换指令的MOVL与MOVJ,还可以进行程序的插入与删除。
选中程序行后,可以在界面右侧路径与点属性窗口,编辑程序属性。
程序运行与监控
- 激活程序
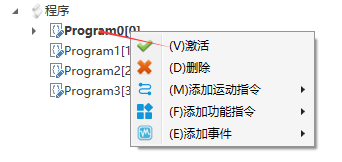
在路径与点窗口的“程序”节点下选中要运行的程序名称,鼠标右键“激活”此程序,被激活的程序加粗显示。
- 仿真运行
打开【机器人】-【同步运行开】功能,场景运行时,机器人被激活的程序同步运行。

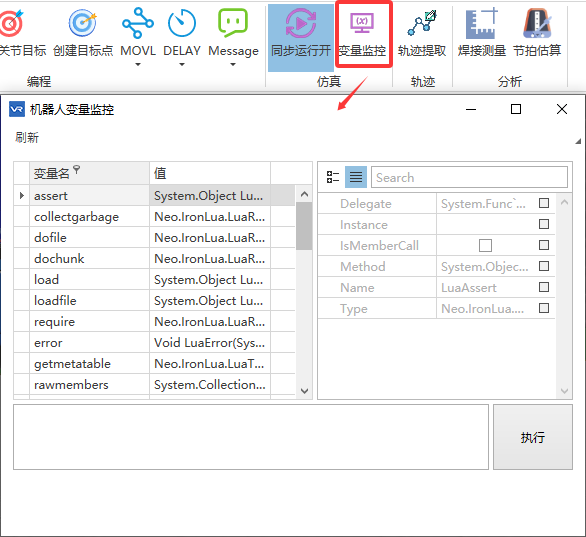
- 变量监控
点击【机器人】-【变量监控】按键,弹出机器人变量监控窗口,实时监控机器人程序变量。
- 节拍分析
机器人程序运行完成后,点击【机器人】-【节拍估算】打开节拍估算窗口,自动生成节拍估算结果。
