路径与工艺
路径与工艺
路径节点罗列基于指定工件提取的轨迹路径点,其有两级:第一级为路径组,第二级为路径组里包含的所有轨迹点,如果当前工件坐标存在路径数据,那么说明此工件坐标是对指定工件进行轨迹提取后自动生成的,并且此工件坐标与对应的工件是绑定的,从工件坐标的名称可以看出来,当工件移动的时候,轨迹路径是跟随工件移动的,因为轨迹路径脱离具体的工件是没有意义的。
- 第一级路径组
对于第一级路径组,支持如下右键功能:

- 可达性检查
,此功能用于检测是否路径中的每个点都是机器人可达的,包括关节是否存在突变,不可达的点以图标
 标识,关节突变的点以图标
标识,关节突变的点以图标 标识,当存在这两种点时需要进行调整,保证所有的点机器人都可达;
标识,当存在这两种点时需要进行调整,保证所有的点机器人都可达; - 用MOVL指令生成运动程序 ,用MOVL命令生成运动指令,即以MOVL指令完成轨迹路径的运动;
- 用MOVJ指令生成运动程序 ,用MOVJ命令生成运动指令,即以MOVJ指令完成轨迹路径的运动;
- 删除 ,删除当前路径;
- 第二级路径点
对于第二级路径点,支持如下右键功能:
![]()
- 定位 ,在3D视图里定位当前点;
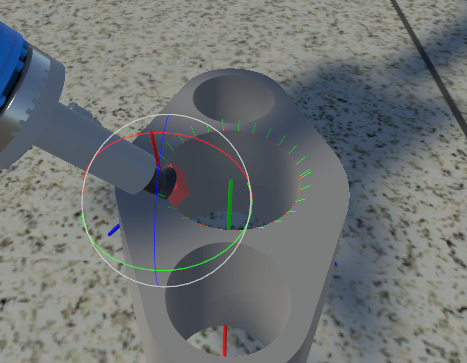
- 修改 ,打开当前点的编辑窗口,名称不允许修改,因为与轨迹关联,否则下次再打开轨迹提取并保存返回后无法识别此点,那么此点将被删除;一般情况下,不建议修改轨迹点的位置参数即X/Y/Z,除非有特别需要,轨迹点的姿态参数即RX/RY/RZ是可以根据需要修改的,其窗口如下图:

在3D视图里,当前选中的点如果显示位置坐标,则是不允许移动点的,通过三维球切换成姿态坐标时,可以调整其姿态参数,如下图:
注意:轨迹点的顺序是不允许调整的;也不能随意增删点,如果必须要调整,请重新打开轨迹提取工具进行点的增加和删除。
- 工艺优化案例
以一下XXX为例分析:
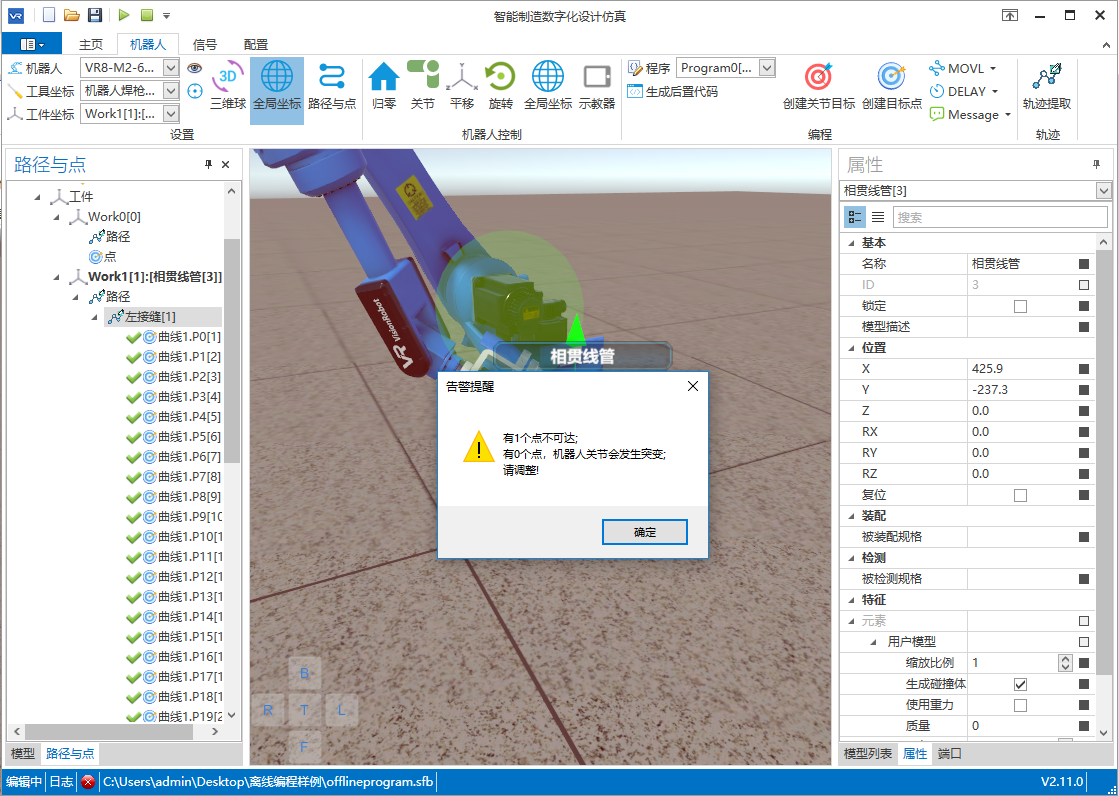
- 可达性分析
在左接缝节点上点击右键,选择功能【可达性检查】,执行对当前轨迹的扫描,扫描结果如下图,从图中看有一个点不可达。
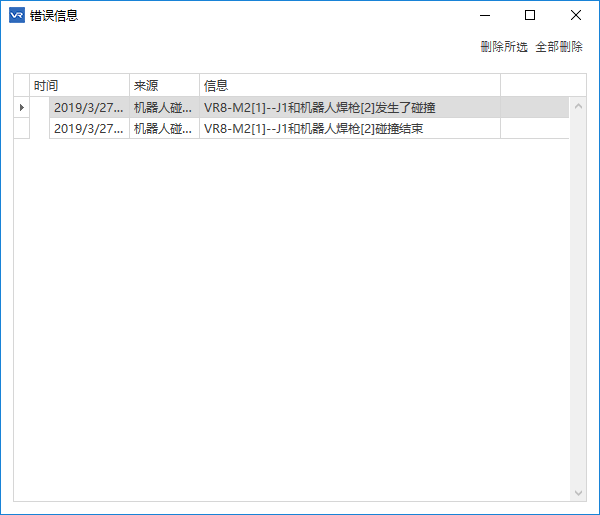
- 碰撞检测
可达性检查时,在右下角的错误信息出现,说明可能有碰撞,错误信息如下图,看出在可达性检查过程中出现了碰撞;
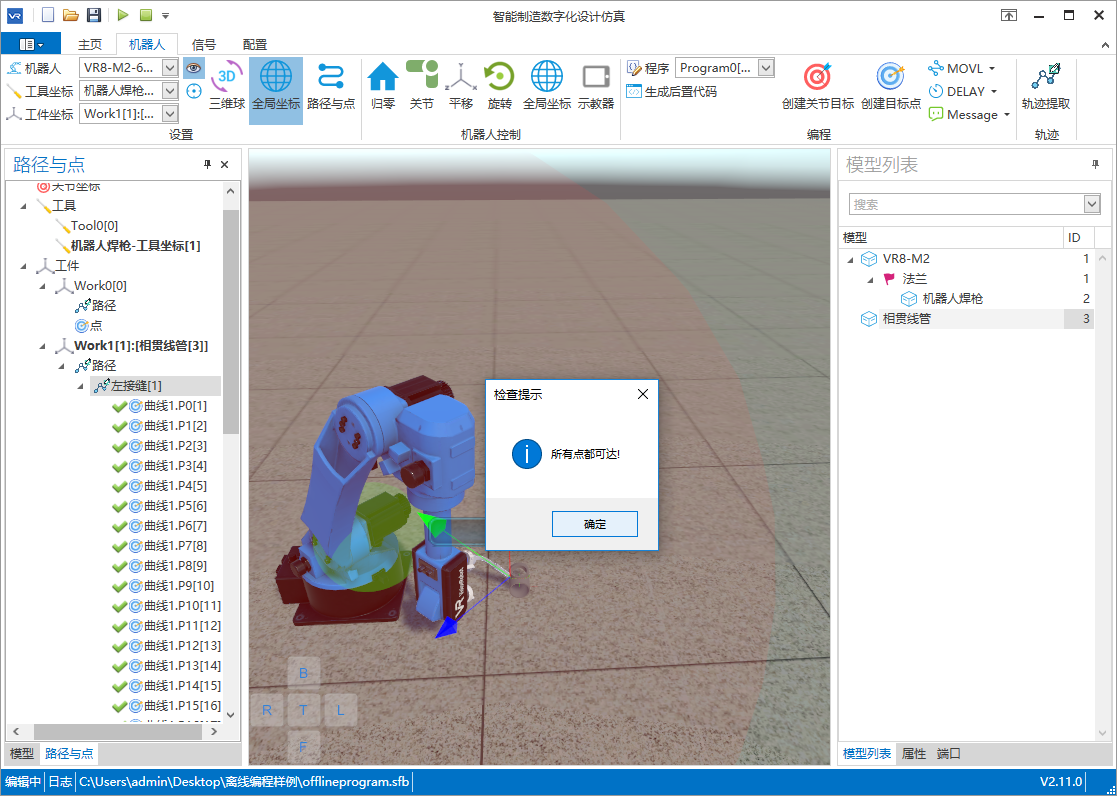
- 工艺优化
从不可达的原因分析,应该是工件离机器人太近导致,选中工件坐标并让其远离机器人适当的距离,但不超出机器人的工作范围,然后重新检测轨迹点的可达性,如下图,所有的点都已经可达;