三菱机器人虚拟仿真
三菱机器人虚拟仿真
1. 启动三菱机器人仿真模拟器
- 打开“RT ToolBox2”软件,新建机器人工程 (1). 双击“RT ToolBox2”桌面图标运行软件。

软件打开后界面如下图所示:
(2). 点击菜单“工作区”→“新建”,在“工作区所在处”点击“参照”选择工程存储的路径,在“工 作区名”后输入新建工程的名称,最后点击“OK”完成。

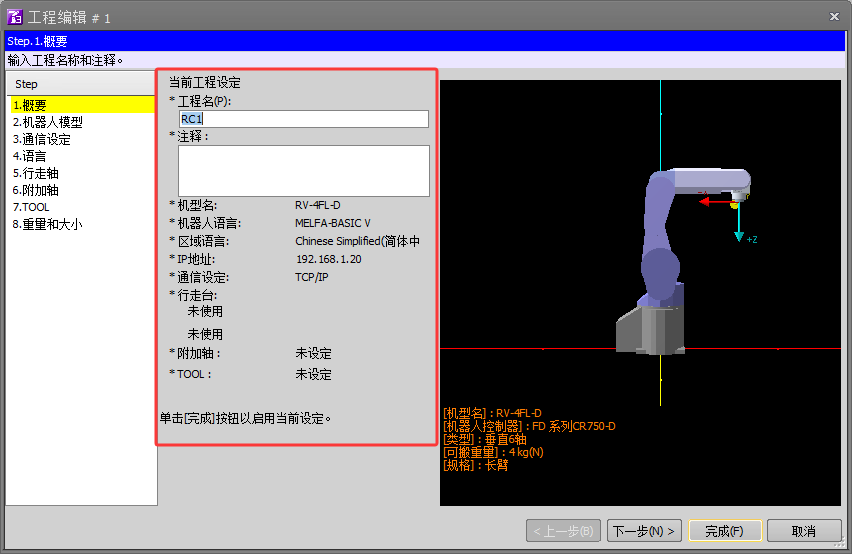
(3). 在“工程编辑”选择机器人机型,设定机器人语言,通讯设定选择“TCP/IP”并在“详细设定”中填写控制器 IP 地址,同时设置计算机的 IP 的地址在同一网段内且地址不冲突,其它行走台与附加值等设定根据场景需求配置即可,配置结束点击“完成”新建工程完成。
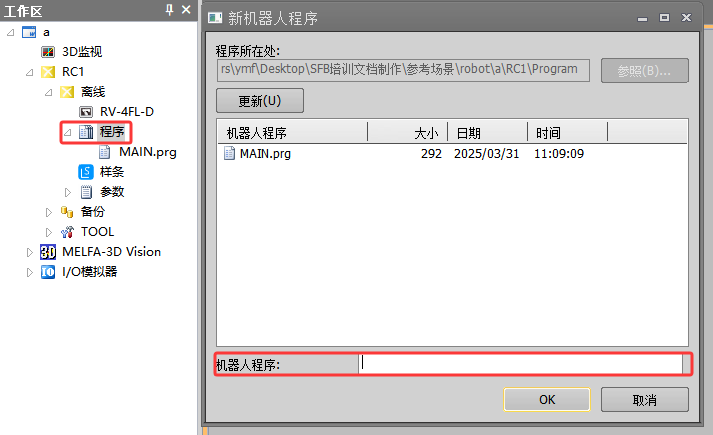
- 程序编辑与在线 (1). 在“工作区”工程“RC1”下的“离线”→“程序”上右键点击,在出现的菜单中点击“新建”, 弹出的“新机器人程序”画面中的“机器人程序”后面输入程序名。最后点击“OK”键完成
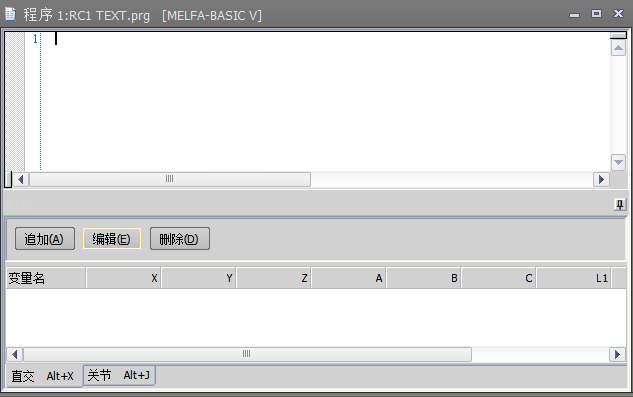
(2). 程序建立完成后双击程序名可以进入程序编辑界面,其中上半部分是程序编辑区,下半部分是 位置点编辑区。
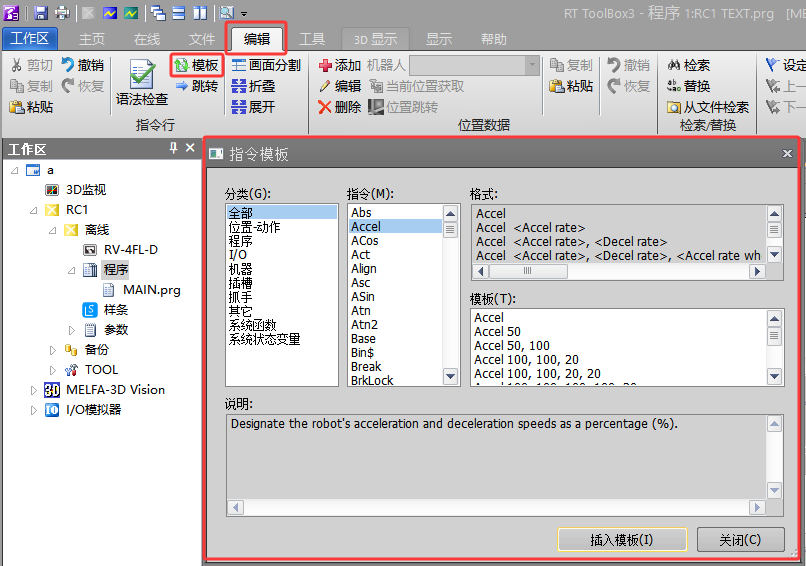
(3). 在程序编辑区的光标闪动处可以直接输入程序命令,或在菜单“编辑”中选择并点击“模板”,在“分类”中选择指令类型,然后在“指令”中选择合适的指令,从“模板”中可以看到该指令的使用样 例。下方的“说明”栏中有此指令的使用简单说明,选中指令后点击“插入模板”或双击指令都能将指令 自动输入到程序编辑区。
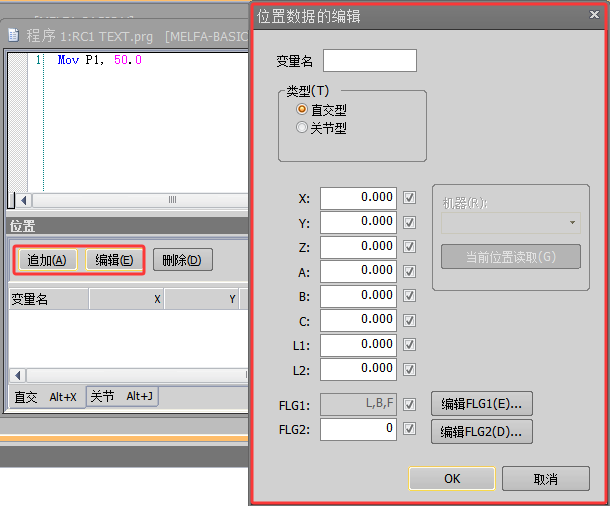
(4). 指令输入完成后,在位置点编辑区点击“追加”,增加新位置点,在“位置数据的编辑”界面上和 “变量名”后输入与程序中相对应的名字,对“类型”进行选择,默认为“直交型”。如编辑时无法确定 具体数值,可点击“OK”键先完成变量的添加,再用示教的方式进行编辑。
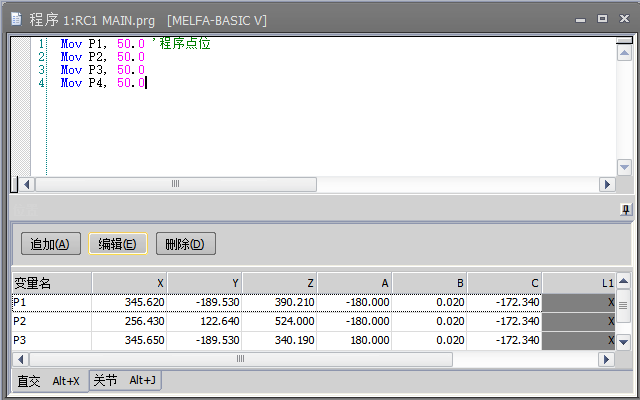
(5). 简单编辑一段路径如下图所示,在各指 令后以“’”开始输入的文字为注释,有助于对程序的理解和记忆,符号“’”在半角英文标点输入下才有 效,否则程序会报错。
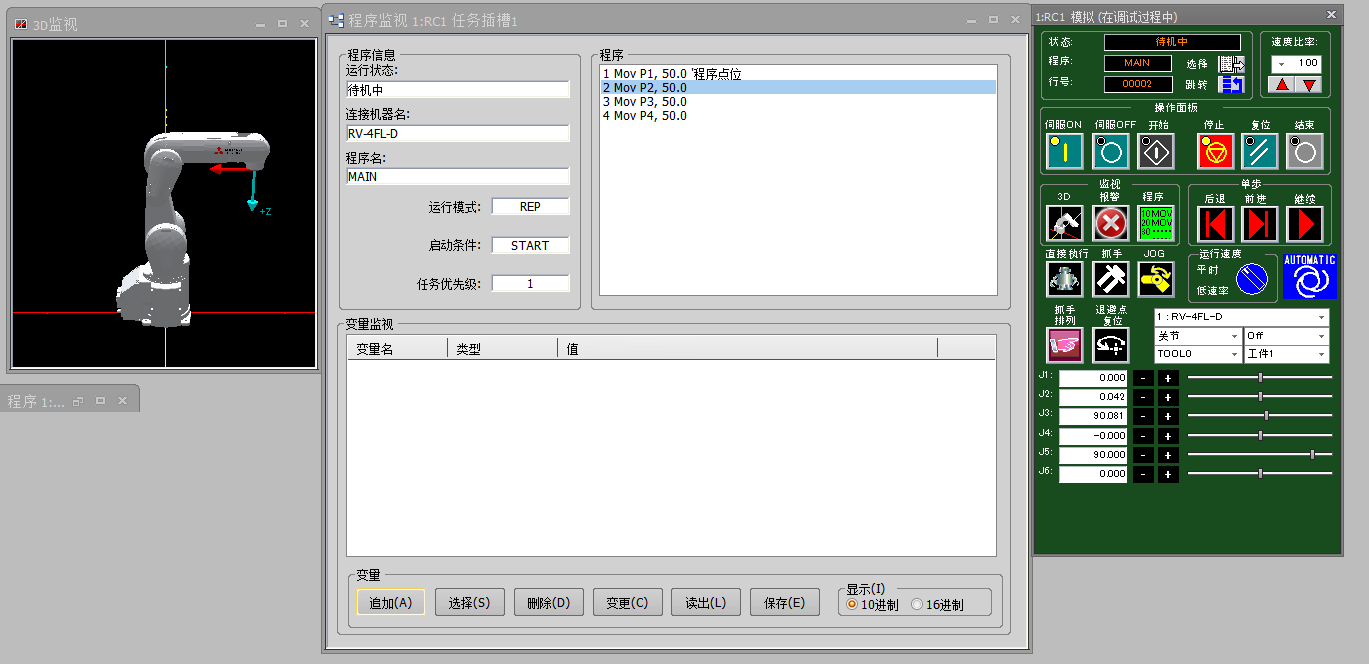
(6). 菜单选项中点击【在线】-【模拟】,打开机器人模拟器。
(7). 使用模拟器功能可以控制机器人动作,程序运行等操作。
2. SFB与虚拟虚拟仿真通讯
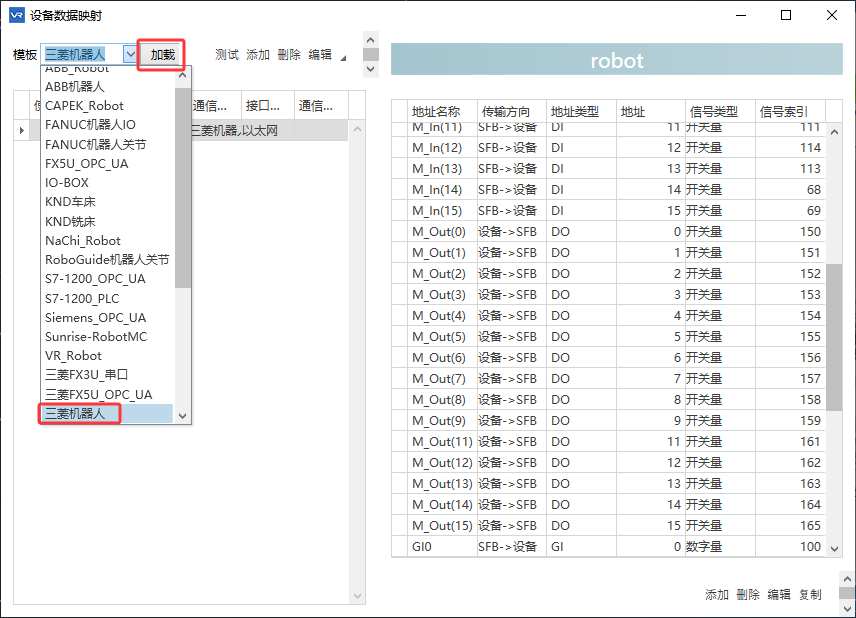
- 选择数据映射:菜单栏-信号-数据映射,打开设备数据映射窗口,添加模板-三菱机器人
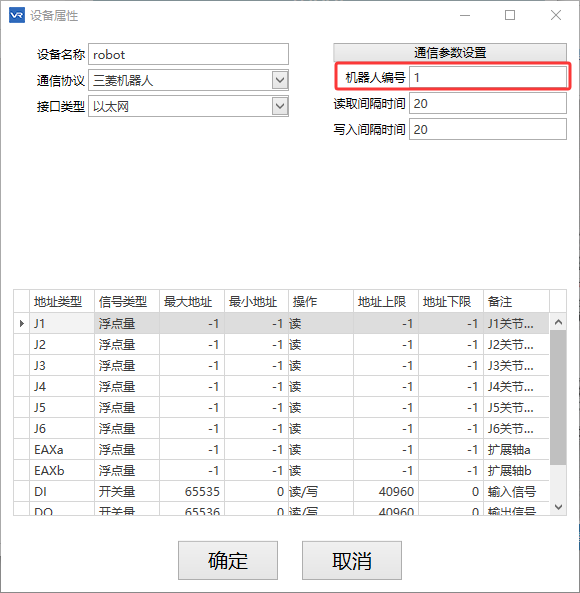
- 点击编辑,填写机器人编号,对应机器人仿真器编号。

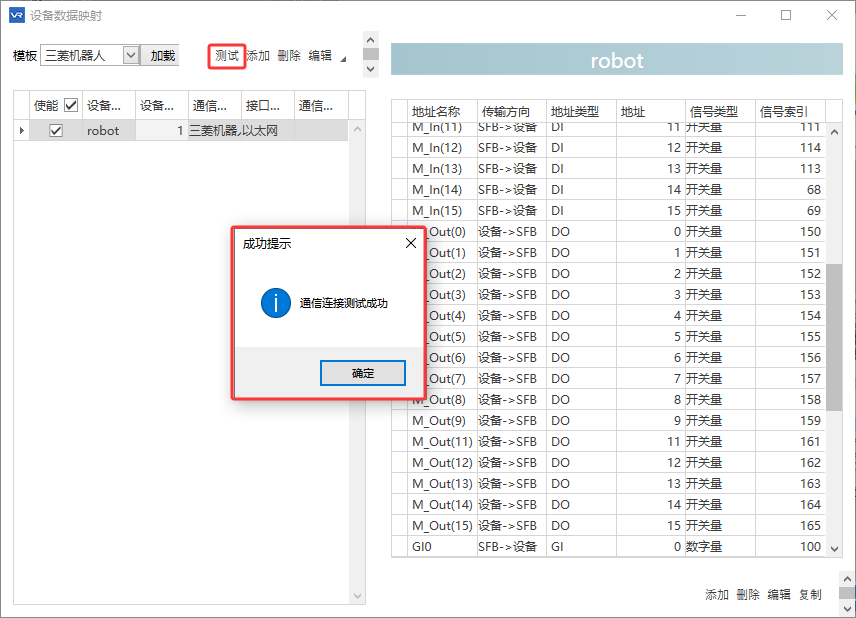
- 测试通讯
点击测试,测试SFB与虚拟示教器之间的通讯: