Fanuc机器人虚拟仿真
Fanuc机器人虚拟仿真
1. 创建RoboGuide 工程
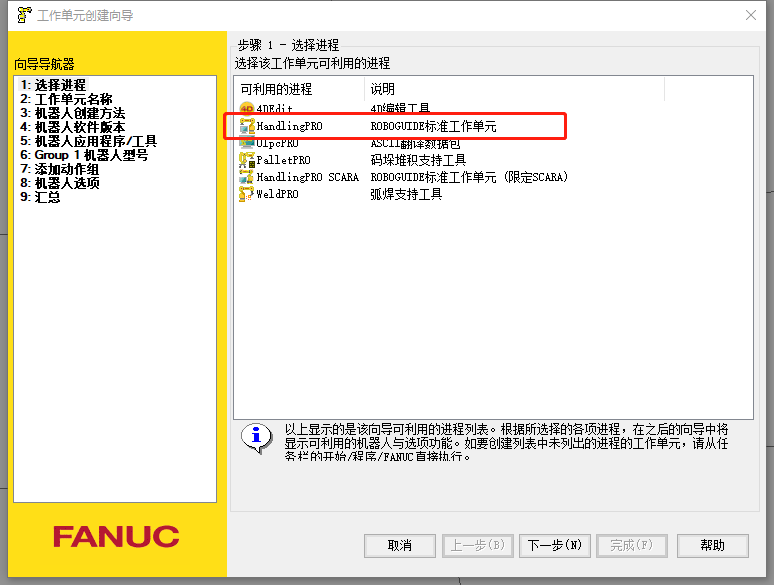
- 选择进程
在RobotGuide中,选择【文件】--【新建工作单元】,选择进程HandlingPRO
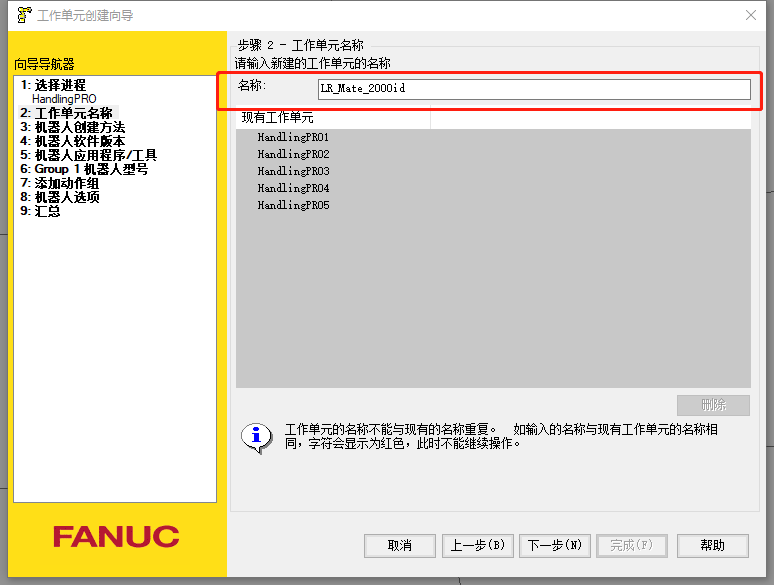
- 输入工作单元名称
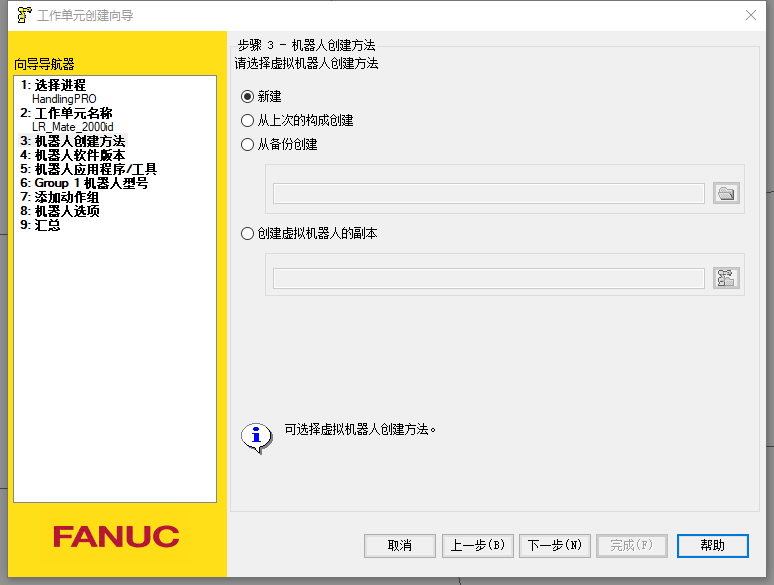
- 选择机器人创建方法
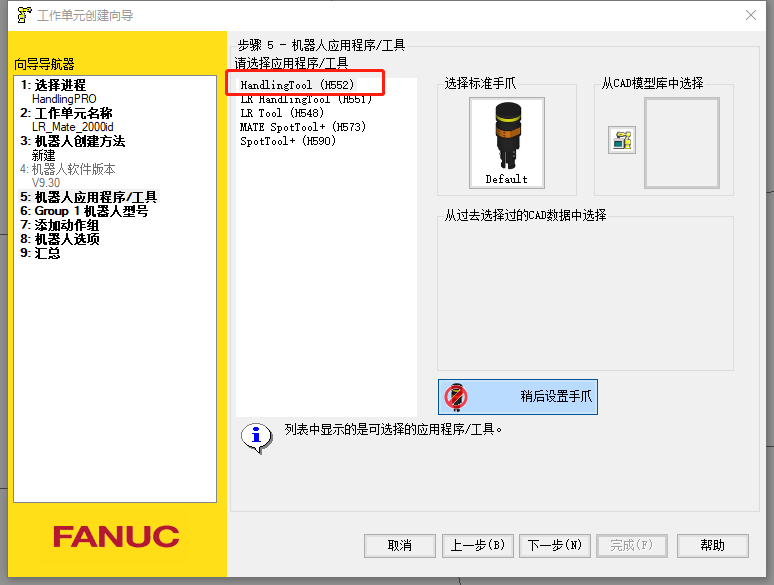
- 选择夹具
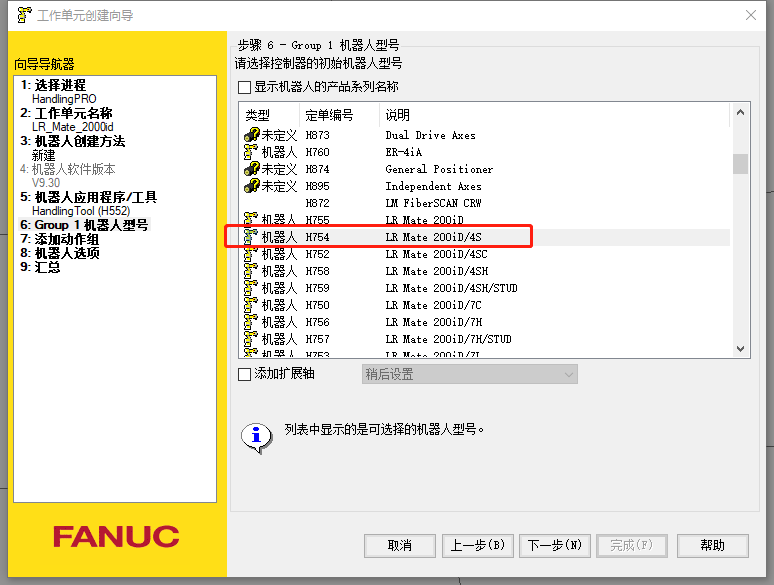
- 选择机器人型号
根据实物机器人,选择相应的机器人型号;本例选择:LR Mate 2000 iD/4S
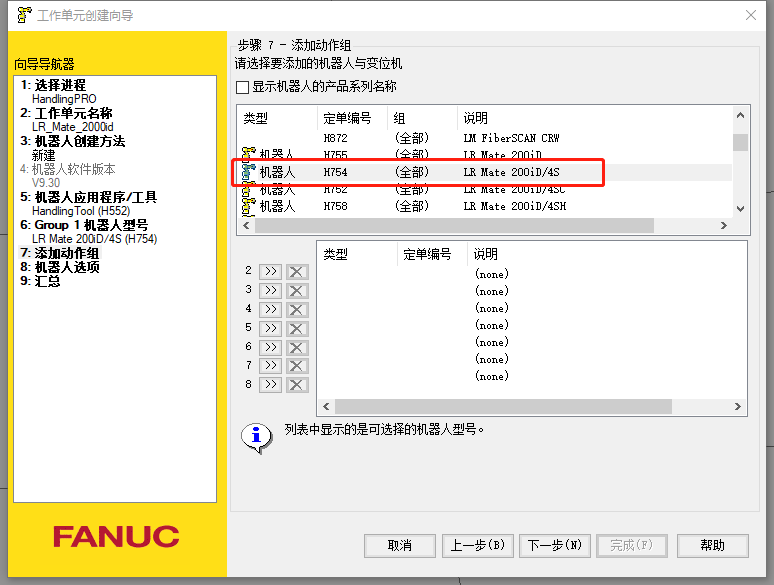
- 添加动作组
根据实物机器人,选择相应的机器人型号;本例选择:LR Mate 2000 iD/4S
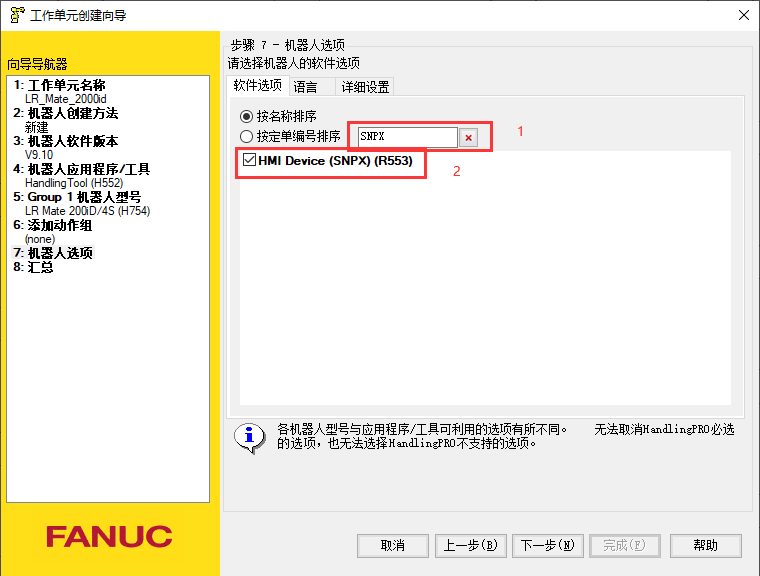
- 添加对SNPX协议支持
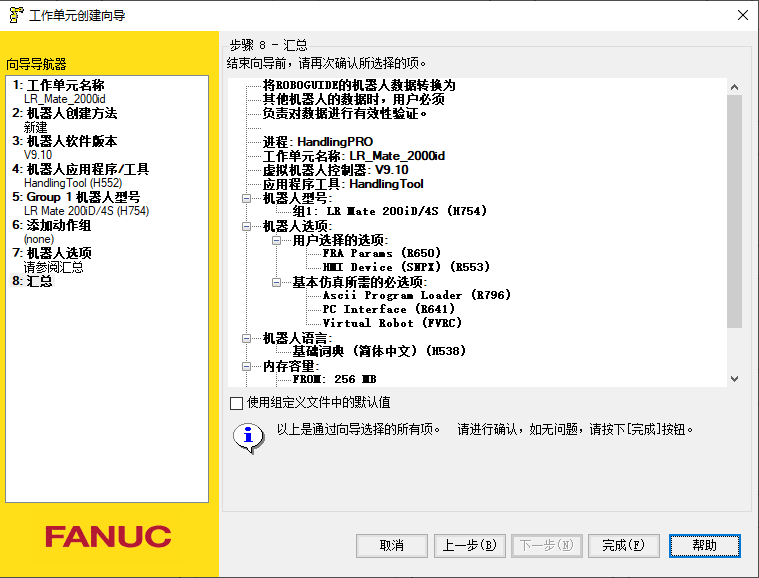
- 确认工程设置
2. 启动虚拟示教器
- 打开目录树窗口
“目录树”窗口,窗口默认处于打开状态。如果没有打开,点击菜单【视图】--【目录树】
- 创建示教器程序
在“目录树”窗口中,打开“机器人控制器”目录,在“程序”子目录,打开右键快捷菜单,并选择“创建TP程序”;弹出“创建程序”对话框,然后输入示教器名称;
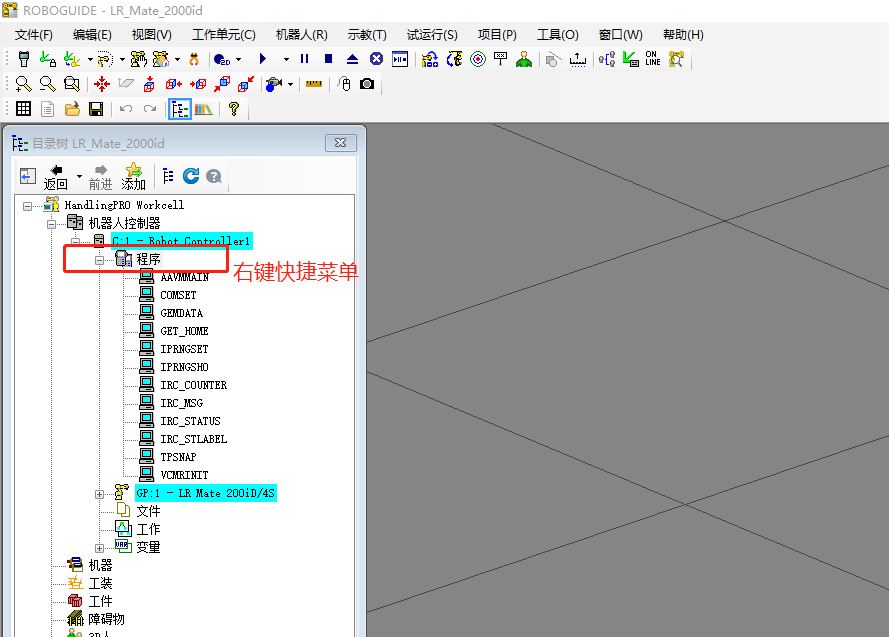

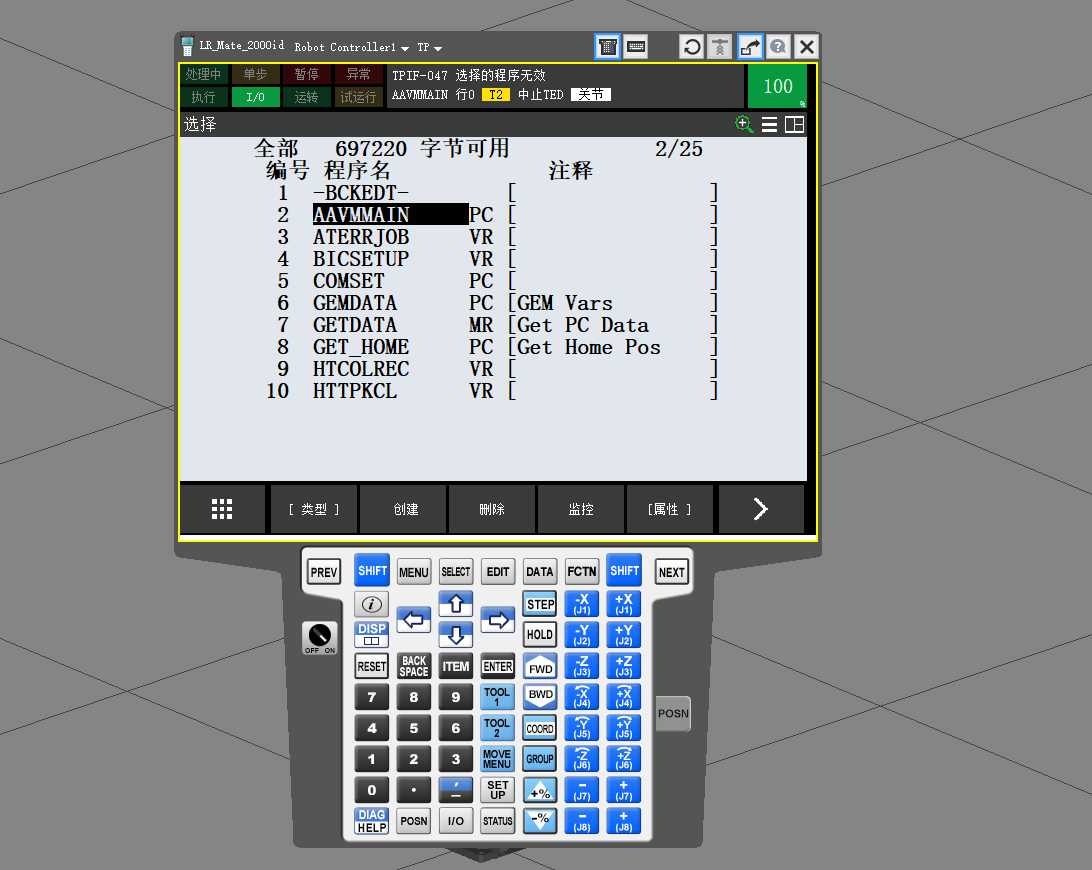
点击“确定”按钮,完成示教器的创建;创建完成后,自动显示TP界面;示教器操作方法同实物示教器保持一致。
3. 机器人通讯配置
- 打开“设置协议”界面
在虚拟示教器中,点击【MENU】,在弹出菜单中,点击【设置】,然后选择【选择程序】中的【主机通讯】,打开“设置协议”界面
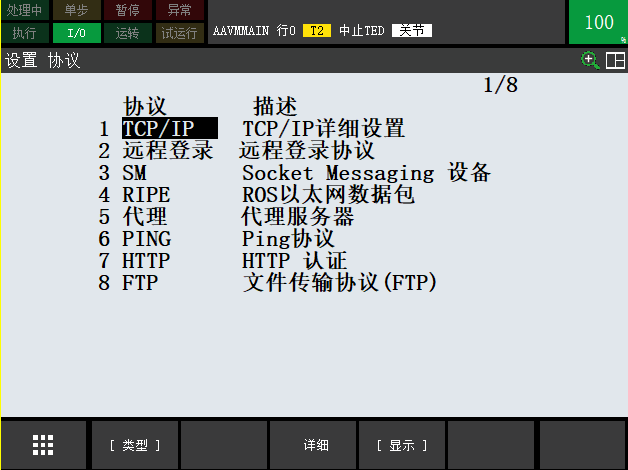
- 设置TCP/IP
在【设置协议】界面中,选择TCP/IP项,并点击“详细”按钮,进入“ROBOT设置主机通信”界面;IP地址和子网掩码与本机保持一致;
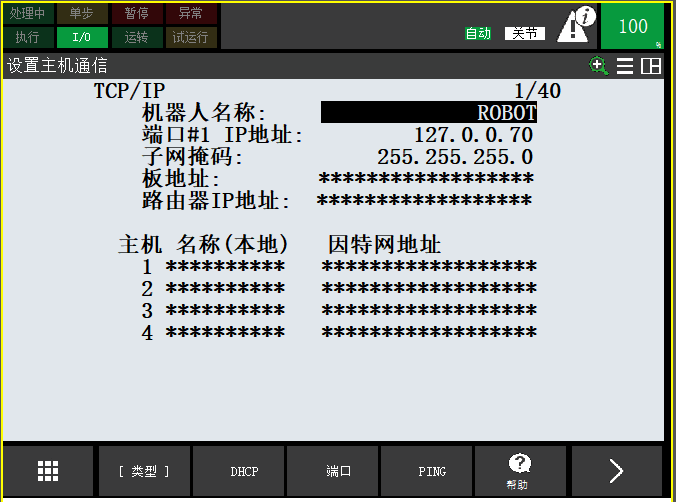
如果远程电脑需要访问,则在主机列表中,添加远程电脑名称和网络地址
- 信号及寄存器配置
分配UO[1-20]及UI[1-18]

分配DO[1-64]及DI[1-64],其它不分配

- 设置SNPX系统参数
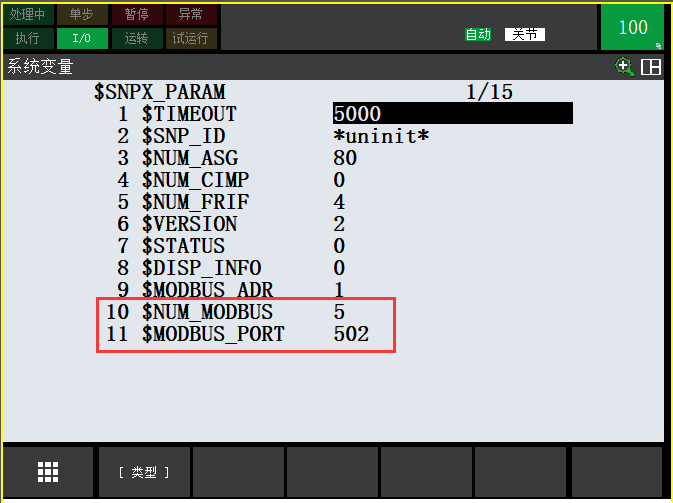
在虚拟示教器中,点击【MENU】,此时显示标记为“MENU 1”的菜单,点击【0--下一页--】,显示标记为“MENU 2”的菜单,在弹出菜单中,点击【系统】,然后选择 【变量】
在“系统变量”界面中,点击示教器或键盘上的往下键,找【SNPX_PAPAM】,并设置
在“系统变量”界面中,点击示教器或键盘上的往上键,找到【SNPX_ASG】,并设置机器人通讯数据
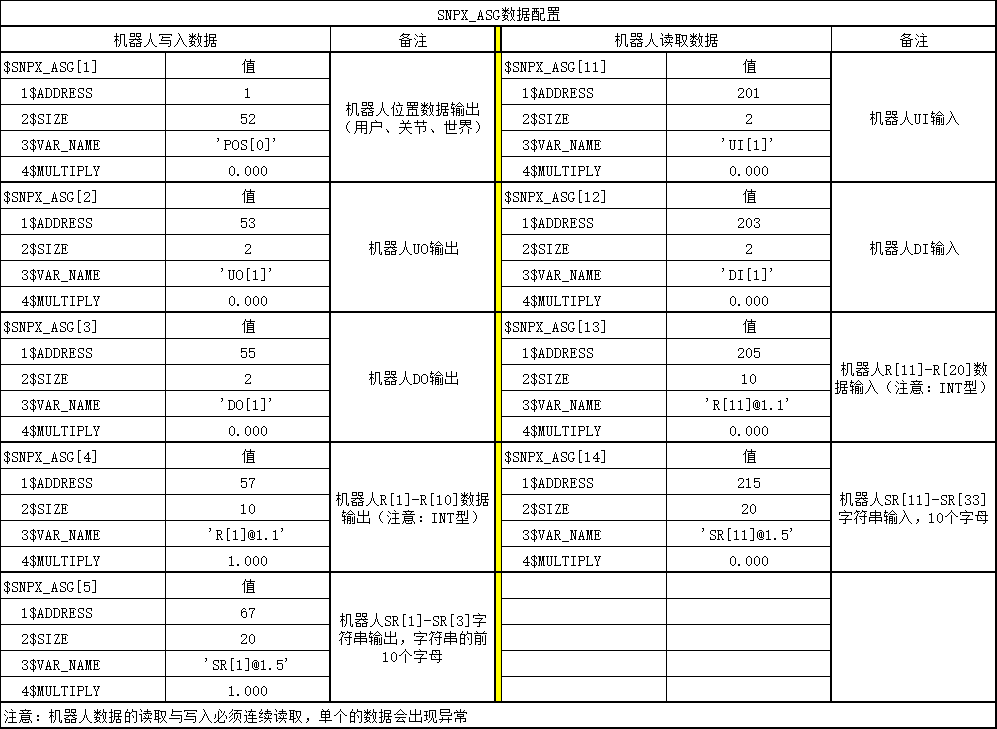
以上分配结束后,重启机器人后生效
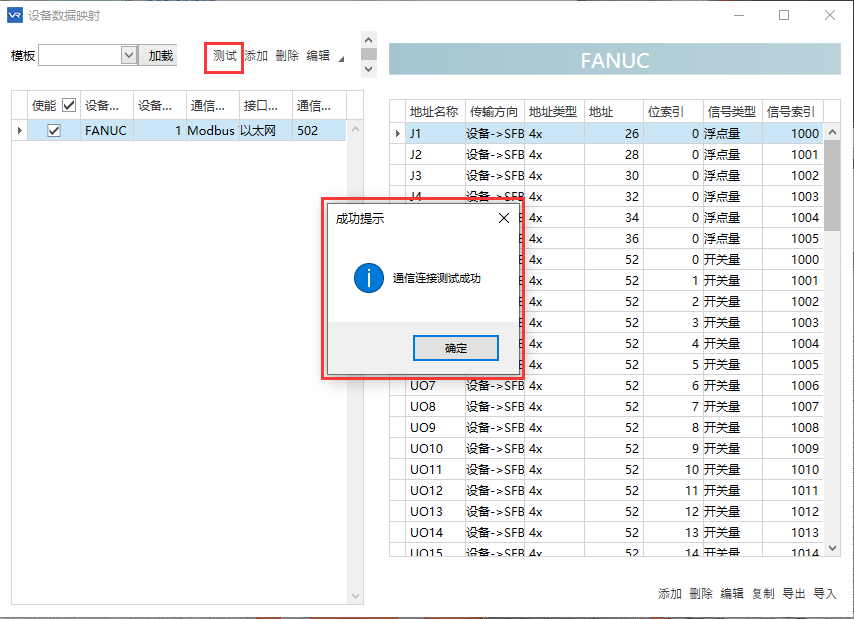
4. SFB与虚拟示教器通讯配置
- SFB【主菜单】-【信号】-【数据映射】打开设备数据映射窗口;
- 点击“测试”测试通讯;